一、產品介紹
ErgoADAS駕駛安全輔助系統
津發科技專注于HMI人機交互、駕駛行為、汽車測試以及智能ADAS系統開發的人-車-路-環境測試云平臺解決方案,并研發了基于云架構的“以人為中心”的多元數據同步采集和定量化分析平臺,以測量、記錄、顯示、分析和識別人-車-路環境數據為核心。可以解決駕駛心理行為研究、車輛行駛狀態分析、主動安全駕駛與自動駕駛技術、交通道路環境數據采集等研究內容,提供*范圍內的測試技術和整體解決方案。
二、功能特點
ErgoADAS駕駛安全輔助系統
l 滿足各種實驗方案與研究需求:支持實車道路測試與研究,提供改裝車輛以及外部交通環境數據采集,實現真正的“人-車-路-環境”數據協同;支持駕駛模擬環境下的駕駛人行為測試、HMI人機交互測試,提供駕駛模擬方案,包括模擬駕駛艙、視景仿真和交通場景搭建與物理及聲光環境仿真,實現“智能駕駛模擬”HMI人機交互與人機工效評價一站式解決方案。
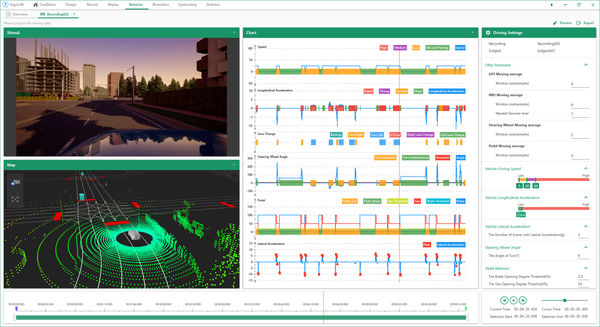
基于云架構的數據采集及研究流程:系統包含云項目管理、云實驗設計、同步記錄、數據回放、信號處理與統計分析,涵蓋整個研究流程,滿足各種課題項目。
科學的信號處理與數據分析統計:系統具有科學、針對性的信號算法與處理流程,包含車輛分析、駕駛人狀態識別、時空分析、生理分析、腦電分析、眼動分析、行為分析、動作姿態傷害評估以及表情與狀態識別等,輸出完整的數據統計與可視化報告。
多元數據同步采集與分析:系統支持多維度數據的實時同步與事后同步,包含車輛數據、道路環境數據、生理、眼動、腦電、動作捕捉、行為觀察與面部表情等數據的同步采集與綜合分析。
開放式設備接口與數據兼容:系統通過SDK/API/TTL等廣泛的數據接口進行第三方設備或者數據同步,同時可以直接導入外部數據,與系統內數據進行同步分析,支持定制開發。
三、產品模塊
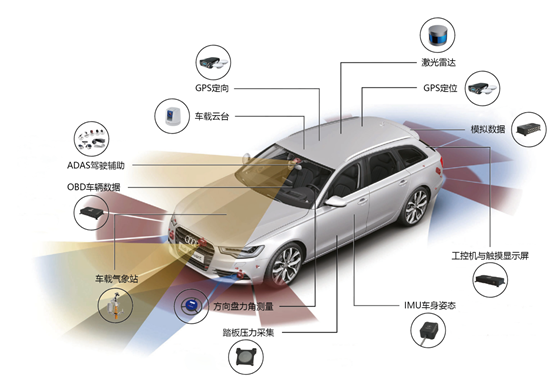
1、VHUB自然駕駛試驗車
VHUB駕駛試驗車主要包括的產品模塊有: VHUB駕駛試驗車、V-HUB 汽車測試采集系統、V-HUB駕駛行為采集系統、V-HUB Enviorment環境數據采集系統、VHUB AI傳感器模塊(分別服務于感知系統和定位系統)、以及V-HUB Simulation交通信息仿真平臺。
每個模塊下均包含一系列高精度傳感器產品:
(1)VHUB駕駛試驗車
ErgoLAB人車路環境同步云平臺(車輛數據分析模塊)
汽車改造(常規汽車或新能源)
車載工作站
車載UPS
(2)V-HUB SyncBOX車輛數據采集系統主機
VHUB GPS傳感器
VHUB OBD接口
VHUB CAN總線接口
VHUB IMU姿態傳感器
VHUB激光車身姿態傳感器
VHUB輪速傳感器
(3)V-HUB Video駕駛行為采集系統
V-HUB Video道路場景與駕駛行為采集平臺
VHUB Steering方向盤傳感器
VHUB Foot腳踏板傳感器
(4)V-HUB Enviorment環境數據采集系統
物理環境采集系統
車載氣象站
(5)VHUB AI傳感器平臺
攝像頭
雙目、RGB-D攝像頭
GPS-RTK
慣性測量單元(Inertial Measurement Unit,簡稱 IMU)
激光雷達
毫米波雷達
超聲波傳感器
編碼器、輪速計
ADAS傳感器
多傳感器融合
(6)V-HUB Simulation交通信息仿真平臺
V-HUB交通信息仿真云平臺
車載無人機模塊
車載全景攝像機模塊
車載微波雷達/毫米波雷達
車載ADAS
車載激光3D成像
(7)其他標配模塊技術參數
V-HUB車載集線器
VHUB車載工控機
VHUB車載顯示器
VHUB車載系統支架
2、ErgoLAB人車路環境測試云平臺
ErgoLAB人車路環境測試云平臺同步采集多通道數據,包括駕駛人數據、車輛運行數據、道路環境數據,系統針對不同的信號源提供針對性的數據處理、分析與可視化報告呈現,重點聚焦于解決駕駛交通研究
領域的兩大核心問題:駕駛人的狀態識別與車輛與駕駛風格監測,進而實現多源異構數據的系統融合。
(1) 車輛測試分析系統
l車輛基礎數據統計分析
l車輛運行狀態分析
l汽車高級性能測試
(2)駕駛員狀態分析預警
(3)時空行為數據分析
(4)行為分析系統
(5)動作捕捉分析系統
(6)眼動分析系統
(7)面部表情數據分析
(8)生理分析系統













 掃一掃,關注微信
掃一掃,關注微信